Horstman Adaptive Learning Technology
The Horstman adaptive learning technology enables the active suspension controller to optimize the ride performance of the suspension system, whilst driving the vehicle, and uses the sensing package on the vehicle.
The Horstman adaptive learning technology enables the active suspension controller to optimize the ride performance of the suspension system, whilst driving the vehicle, and uses the sensing package on the vehicle. This system requires no operator input to optimise the suspension performance, speeding up the development and improvement of the vehicle platform suspension performance.
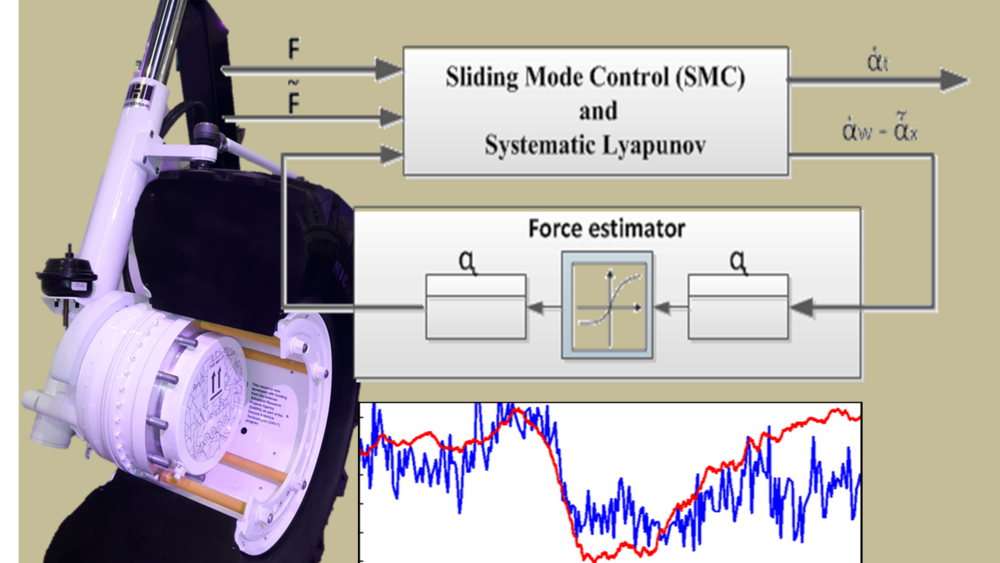
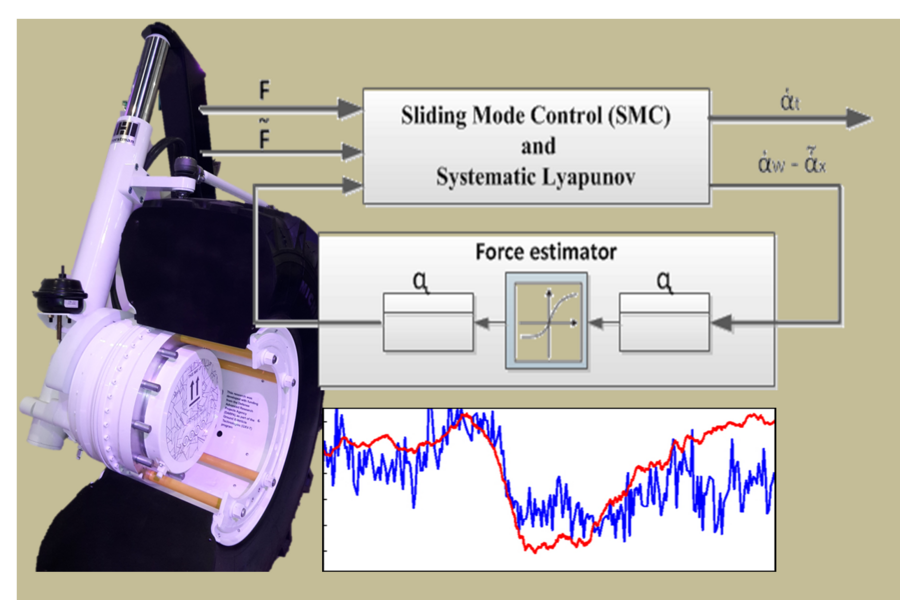
The adaptive learning technology combines sliding mode control (SMC) and systematic Lyapunov design approaches. These two approaches are as follows:
1. SMC design approach consists of two phases: (i) selection of a sliding (switching) surface so as to achieve the desired system behavior (e.g., asymptotic stability), when restricted to the surface; and (ii) selection of a control law such that the existence of sliding mode can be guaranteed.
2. Systematic Lyapunov design approach consists of three phases: (i) selection of a control law with variable parameters or terms; (ii) selection of an updated law for adjusting the variable terms; and (iii) analysis of the convergence properties of the designed controller. Using this two approaches enables Horstman to converge the control algorithm to achieve a stable platform performance.
Nonlinear control mode
- All the operating points of the system can be considered
- No need to linearize the nonlinear system about some operating points
Sliding-mode controllers
- Capability to deal with uncertainties, good performance, and very fast response
Systematic Lyapunov design approach
- Asymptotic robust stability of the closed-loop system in the presence of model uncertainties and disturbances
End travel impact force
- Function smoothly decrease the actuator force when it approaches the maximum allowable maximum force, preventing sudden jarring end of travel stops
Adaptability
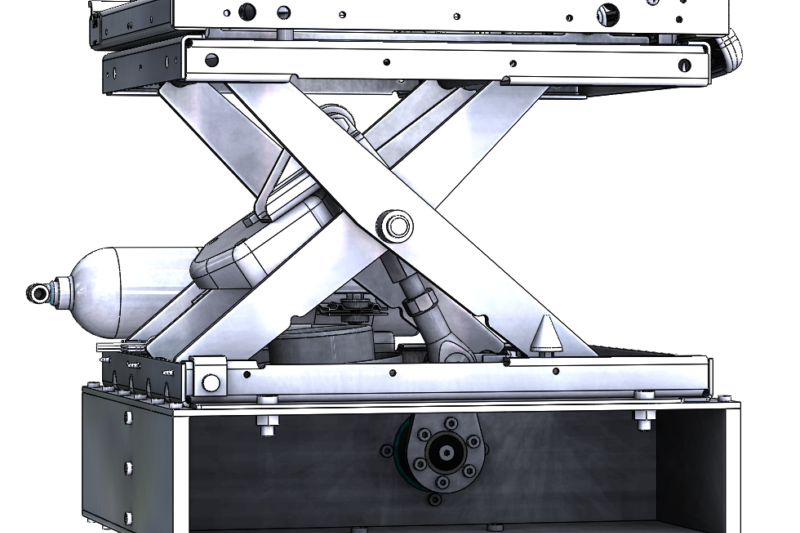
- Adaptable to Active Damping and active suspension for vehicle, seat and active track tensioner
Application


Any questions to our company?

You are more than welcome to explore our website. In case you have any questions and demands in regard to our company, get in touch and send us an email.